|
Robot Simulator of the Robotics Group for Self-Organization of Control
0.8.0
|
|
Robot Simulator of the Robotics Group for Self-Organization of Control
0.8.0
|
#include "abstractwiring.h"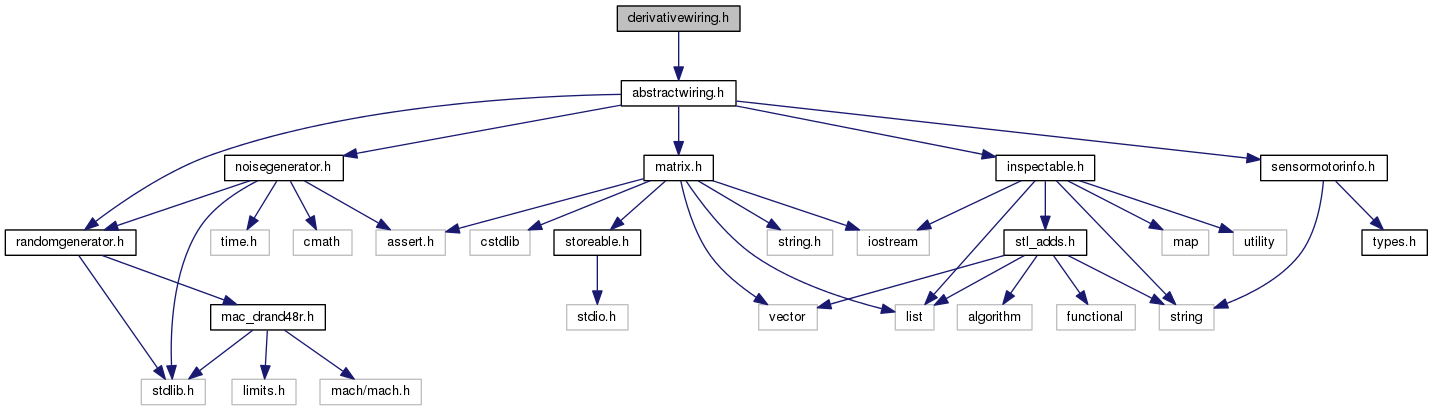
Go to the source code of this file.
Classes | |
| struct | __DerivativeWiringConf |
| Configuration object for DerivativeWiring. More... | |
| class | DerivativeWiring |
| Implements a wiring (between controller and robot) which includes the first and second derivative of the original robot sensor values. More... | |
Typedefs | |
| typedef struct __DerivativeWiringConf | DerivativeWiringConf |
| Configuration object for DerivativeWiring. More... | |
| typedef struct __DerivativeWiringConf DerivativeWiringConf |
Configuration object for DerivativeWiring.
If all boolean parametes are false, id is set to true (equivalent to One2OneWiring)
 1.8.6
1.8.6 
