LineImgProc Struct Reference
creates a lightsensitive sensorline. More...
#include <imageprocessors.h>
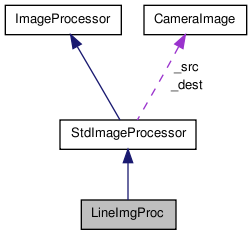
Inherits lpzrobots::StdImageProcessor.
Collaboration diagram for LineImgProc:
Public Member Functions | |
| LineImgProc (bool show, float scale, int num, double factor=20.0) | |
| virtual | ~LineImgProc () |
| virtual void | initDestImage (Camera::CameraImage &dest, const Camera::CameraImage &src) |
| overload this function and initialise the dest.img and the dest.name | |
| virtual void | process (const osg::Image *src, osg::Image *dest) |
| overload this function and do processing here | |
Public Attributes | |
| int | num |
| double | factor |
Detailed Description
creates a lightsensitive sensorline.
It requires a black and white source, e.g. provided by BWImageProcessor, ColorFilterImgProc
- Parameters:
-
num number of segments of the sensor line factor factor for average pixel value (rescaling)
- See also:
- StdImageProcessor
Constructor & Destructor Documentation
| LineImgProc | ( | bool | show, | |
| float | scale, | |||
| int | num, | |||
| double | factor = 20.0 | |||
| ) | [inline] |
| virtual ~LineImgProc | ( | ) | [inline, virtual] |
Member Function Documentation
| virtual void initDestImage | ( | Camera::CameraImage & | dest, | |
| const Camera::CameraImage & | src | |||
| ) | [inline, virtual] |
overload this function and initialise the dest.img and the dest.name
Implements StdImageProcessor.
| virtual void process | ( | const osg::Image * | src, | |
| osg::Image * | dest | |||
| ) | [inline, virtual] |
overload this function and do processing here
Implements StdImageProcessor.
Member Data Documentation
| double factor |
| int num |
The documentation for this struct was generated from the following file:
