OSGHeightField Class Reference
Graphical HeightField. More...
#include <osgheightfield.h>
Inherits lpzrobots::OSGPrimitive.
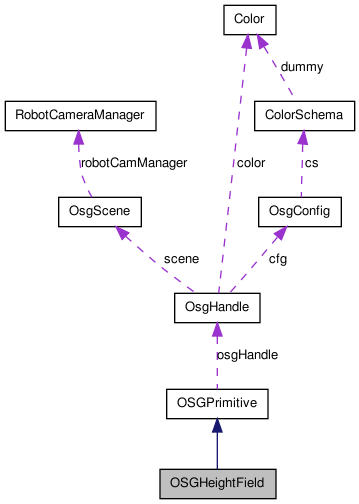
Collaboration diagram for OSGHeightField:
Public Types | |
| enum | CodingMode { Red, Sum, LowMidHigh } |
height coding using in the read in bitmap. More... | |
Public Member Functions | |
| OSGHeightField (osg::HeightField *heightfield, float x_size, float y_size) | |
| OSGHeightField (const std::string &filename, float x_size, float y_size, float height) | |
| virtual void | setMatrix (const osg::Matrix &matrix) |
| Sets the transformation matrix of this object (position and orientation). | |
| virtual void | init (const OsgHandle &osgHandle, Quality quality=Middle) |
| Initialisation of the primitive. | |
| virtual const osg::HeightField * | getHeightField () const |
Static Public Member Functions | |
| static osg::HeightField * | loadFromPPM (const std::string &filename, double height, CodingMode codingMode=Red) |
| loads an ppm image and returns the height field using the given coding and the height (maximal height of the heightfield) | |
| static double | coding (CodingMode mode, const unsigned char *data) |
| return the height using the given coding mode. The data pointer points to RGB data point | |
Protected Attributes | |
| osg::HeightField * | field |
| float | x_size |
| float | y_size |
Detailed Description
Graphical HeightField.
Member Enumeration Documentation
| enum CodingMode |
Constructor & Destructor Documentation
| OSGHeightField | ( | osg::HeightField * | heightfield, | |
| float | x_size, | |||
| float | y_size | |||
| ) |
| OSGHeightField | ( | const std::string & | filename, | |
| float | x_size, | |||
| float | y_size, | |||
| float | height | |||
| ) |
Member Function Documentation
| double coding | ( | CodingMode | mode, | |
| const unsigned char * | data | |||
| ) | [static] |
return the height using the given coding mode. The data pointer points to RGB data point
| virtual const osg::HeightField* getHeightField | ( | ) | const [inline, virtual] |
Initialisation of the primitive.
Must in order to place the object into the scene. This function should be overloaded
Implements OSGPrimitive.
| HeightField * loadFromPPM | ( | const std::string & | filename, | |
| double | height, | |||
| CodingMode | codingMode = Red | |||
| ) | [static] |
loads an ppm image and returns the height field using the given coding and the height (maximal height of the heightfield)
| void setMatrix | ( | const osg::Matrix & | m4x4 | ) | [virtual] |
Sets the transformation matrix of this object (position and orientation).
Reimplemented from OSGPrimitive.
Member Data Documentation
osg::HeightField* field [protected] |
float x_size [protected] |
float y_size [protected] |
The documentation for this class was generated from the following files:
