ComplexPlayground Class Reference
Playground that uses an xfig file with polylines linetype 0 is normal wall linetype 1 is border thickness is used as well, thickness is multiplied with wallthickness. More...
#include <complexplayground.h>
Inherits lpzrobots::AbstractGround.
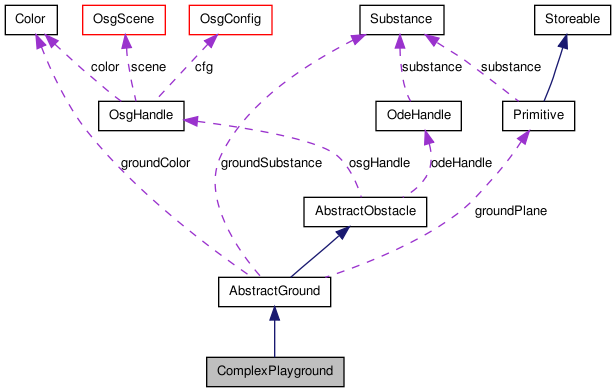
Collaboration diagram for ComplexPlayground:
Public Member Functions | |
| ComplexPlayground (const OdeHandle &odeHandle, const OsgHandle &osgHandle, const std::string filename, double factor=1, double heightfactor=0.02, bool createGround=true) | |
| void | createPolyline (const PolyLine &) |
Protected Member Functions | |
| virtual void | create () |
| overload this function to create the obstactle. All primitives should go into the list "obst" | |
Protected Attributes | |
| std::string | filename |
| double | length |
| double | factor |
| double | heightfactor |
| std::list< PolyLine > | polylines |
Detailed Description
Playground that uses an xfig file with polylines linetype 0 is normal wall linetype 1 is border thickness is used as well, thickness is multiplied with wallthickness.
depth is used as a height value and is multiplied with heightfactor. The entire size can be scaled with a global factor
Constructor & Destructor Documentation
| ComplexPlayground | ( | const OdeHandle & | odeHandle, | |
| const OsgHandle & | osgHandle, | |||
| const std::string | filename, | |||
| double | factor = 1, |
|||
| double | heightfactor = 0.02, |
|||
| bool | createGround = true | |||
| ) |
- Parameters:
-
factor global factor for the entire playground factor for depth value of xfig line to determine wall height
Member Function Documentation
| void create | ( | ) | [protected, virtual] |
overload this function to create the obstactle. All primitives should go into the list "obst"
Implements AbstractObstacle.
| void createPolyline | ( | const PolyLine & | polyline | ) |
Member Data Documentation
double factor [protected] |
std::string filename [protected] |
double heightfactor [protected] |
double length [protected] |
The documentation for this class was generated from the following files:
