ForceBoostWiring Class Reference
Implements one to one wiring that integrates the mismatch between motor commands (understood as target values) and sensor values and adds them to the controller output If more sensors than motors are used it uses just the first m sensors. More...
#include <forceboostwiring.h>
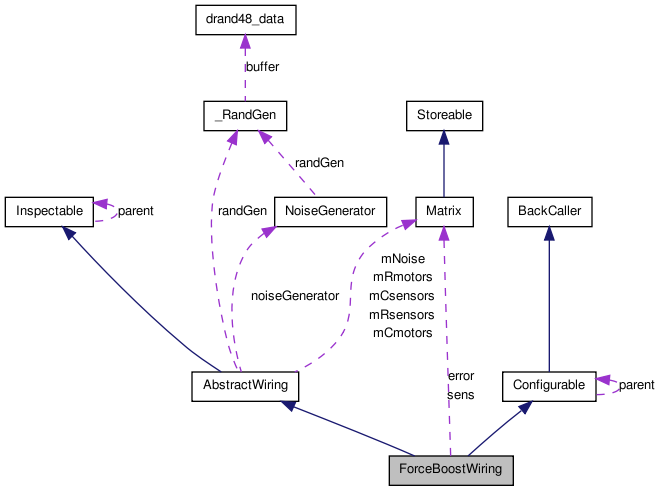
Inherits AbstractWiring, and Configurable.
Public Member Functions | |
| ForceBoostWiring (NoiseGenerator *noise, double boost=0, bool exportBoostError=false, int plotMode=Controller, const std::string &name="ForceBoostWiring") | |
| constructor | |
| virtual | ~ForceBoostWiring () |
| destructor | |
| virtual void | reset () |
| reset internal state | |
Protected Member Functions | |
| virtual bool | initIntern () |
| initializes the number of sensors and motors on robot side, calculate number of sensors and motors on controller side | |
| virtual bool | wireSensorsIntern (const sensor *rsensors, int rsensornumber, sensor *csensors, int csensornumber, double noise) |
| Realizes one to one wiring from robot sensors to controller sensors. | |
| virtual bool | wireMotorsIntern (motor *rmotors, int rmotornumber, const motor *cmotors, int cmotornumber) |
| Realizes one to one wiring from controller motor outputs to robot motors. | |
Protected Attributes | |
| double | boost |
| matrix::Matrix | error |
| matrix::Matrix | sens |
Detailed Description
Implements one to one wiring that integrates the mismatch between motor commands (understood as target values) and sensor values and adds them to the controller output If more sensors than motors are used it uses just the first m sensors.
Constructor & Destructor Documentation
| ForceBoostWiring | ( | NoiseGenerator * | noise, | |
| double | boost = 0, |
|||
| bool | exportBoostError = false, |
|||
| int | plotMode = Controller, |
|||
| const std::string & | name = "ForceBoostWiring" | |||
| ) |
constructor
- Parameters:
-
noise NoiseGenerator that is used for adding noise to sensor values plotMode see AbstractWiring boost factor for mismatch integration exportBoostError whether to export force boost error to inspectables (guilogger)
| ~ForceBoostWiring | ( | ) | [virtual] |
destructor
Member Function Documentation
| bool initIntern | ( | ) | [protected, virtual] |
initializes the number of sensors and motors on robot side, calculate number of sensors and motors on controller side
Implements AbstractWiring.
| void reset | ( | ) | [virtual] |
reset internal state
Reimplemented from AbstractWiring.
| bool wireMotorsIntern | ( | motor * | rmotors, | |
| int | rmotornumber, | |||
| const motor * | cmotors, | |||
| int | cmotornumber | |||
| ) | [protected, virtual] |
Realizes one to one wiring from controller motor outputs to robot motors.
- Parameters:
-
rmotors pointer to array of motorvalues for robot rmotornumber number of robot motors cmotors pointer to array of motorvalues from controller cmotornumber number of motorvalues from controller
Implements AbstractWiring.
| bool wireSensorsIntern | ( | const sensor * | rsensors, | |
| int | rsensornumber, | |||
| sensor * | csensors, | |||
| int | csensornumber, | |||
| double | noise | |||
| ) | [protected, virtual] |
Realizes one to one wiring from robot sensors to controller sensors.
- Parameters:
-
rsensors pointer to array of sensorvalues from robot rsensornumber number of sensors from robot csensors pointer to array of sensorvalues for controller csensornumber number of sensors to controller noise size of the noise added to the sensors
Implements AbstractWiring.
Member Data Documentation
double boost [protected] |
matrix::Matrix error [protected] |
matrix::Matrix sens [protected] |
The documentation for this class was generated from the following files:
