CrossMotorCoupling Class Reference
This is an adapter for a teachable controller to implement a cross motor coupling, see dissertation of Georg Martius. More...
#include <crossmotorcoupling.h>
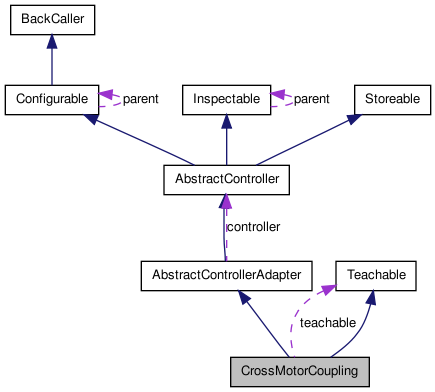
Inherits AbstractControllerAdapter, and Teachable.
Public Member Functions | |
| CrossMotorCoupling (AbstractController *controller, Teachable *teachable, double threshold=0.4) | |
| virtual void | step (const sensor *sensors, int sensornumber, motor *motors, int motornumber) |
| performs one step (includes learning). | |
| virtual void | setCMC (const CMC &cmc) |
| virtual CMC | getCMC () |
| virtual void | setMotorTeaching (const matrix::Matrix &teaching) |
| The given motor teaching signal is used for this timestep. | |
| virtual void | setSensorTeaching (const matrix::Matrix &teaching) |
| The given sensor teaching signal (distal learning) is used for this timestep. | |
| virtual matrix::Matrix | getLastMotorValues () |
| returns the last motor values (useful for cross motor coupling) | |
| virtual matrix::Matrix | getLastSensorValues () |
| returns the last sensor values (useful for cross sensor coupling) | |
Static Public Member Functions | |
| static CMC | getPermutationCMC (const std::list< int > &permutation) |
| creates a permutation cross motor coupling, where for each motor we define one cross motor connection. | |
Protected Attributes | |
| CMC | cmc |
| Teachable * | teachable |
| double | threshold |
| treshhold below which not cmc-teaching is done | |
Detailed Description
This is an adapter for a teachable controller to implement a cross motor coupling, see dissertation of Georg Martius.
Constructor & Destructor Documentation
| CrossMotorCoupling | ( | AbstractController * | controller, | |
| Teachable * | teachable, | |||
| double | threshold = 0.4 | |||
| ) | [inline] |
- Parameters:
-
controller actual controller teachable also pointer to the controller, must be equal to controller. This trick is used to ensure that the controller is both "AbstractController" and "Teachable". threshold value below which (absolute) no cross motor teaching is done (avoids suppression of activity)
Member Function Documentation
| CMC getCMC | ( | ) | [virtual] |
| virtual matrix::Matrix getLastMotorValues | ( | ) | [inline, virtual] |
returns the last motor values (useful for cross motor coupling)
Implements Teachable.
| virtual matrix::Matrix getLastSensorValues | ( | ) | [inline, virtual] |
returns the last sensor values (useful for cross sensor coupling)
Implements Teachable.
| CMC getPermutationCMC | ( | const std::list< int > & | permutation | ) | [static] |
creates a permutation cross motor coupling, where for each motor we define one cross motor connection.
- Parameters:
-
permutation permutation[i]=j means that motor i receives from motor j
| void setCMC | ( | const CMC & | cmc | ) | [virtual] |
| virtual void setMotorTeaching | ( | const matrix::Matrix & | teaching | ) | [inline, virtual] |
The given motor teaching signal is used for this timestep.
It is used as a feed forward teaching signal for the controller. Please note, that the teaching signal has to be given each timestep for a continuous teaching process.
- Parameters:
-
teaching,: matrix with dimensions (motornumber,1)
Implements Teachable.
| virtual void setSensorTeaching | ( | const matrix::Matrix & | teaching | ) | [inline, virtual] |
The given sensor teaching signal (distal learning) is used for this timestep.
The belonging motor teachung signal is calculated by the inverse model. See setMotorTeaching
- Parameters:
-
teaching,: matrix with dimensions (motorsensors,1)
Implements Teachable.
performs one step (includes learning).
Calculates motor commands from sensor inputs.
- Parameters:
-
sensors sensors inputs scaled to [-1,1] sensornumber length of the sensor array motors motors outputs. MUST have enough space for motor values! motornumber length of the provided motor array
Reimplemented from AbstractControllerAdapter.
Member Data Documentation
double threshold [protected] |
treshhold below which not cmc-teaching is done
The documentation for this class was generated from the following files:
