hand.h File Reference
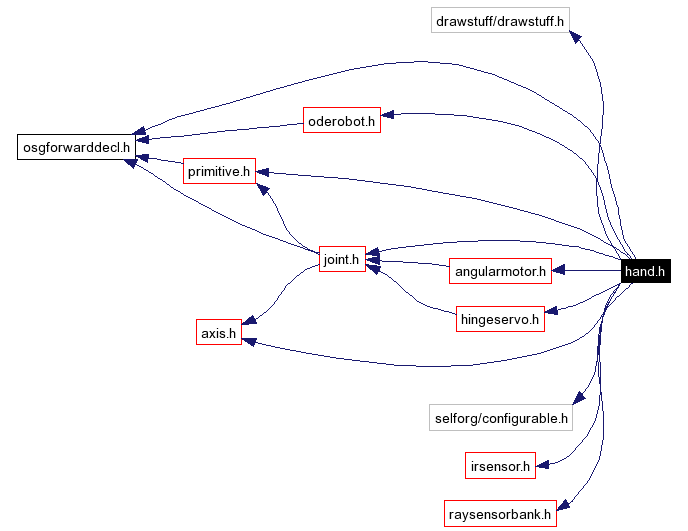
#include <drawstuff/drawstuff.h>
#include "oderobot.h"
#include <selforg/configurable.h>
#include "primitive.h"
#include "joint.h"
#include "angularmotor.h"
#include "hingeservo.h"
#include "osgforwarddecl.h"
#include "axis.h"
#include "irsensor.h"
#include "raysensorbank.h"
Include dependency graph for hand.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Enumeration Type Documentation
|
|
- Enumeration values:
-
| Draw_All |
|
| Draw_just_Sensor |
|
| Draw_just_Ray |
|
| Draw_Nothing |
|
|
|
|
- Enumeration values:
-
| Is_Draw_under_180_degree |
|
| Is_Draw_under_90_degree |
|
|
|
|
- Enumeration values:
-
| irDrawAll |
|
| irBack |
|
| irSide |
|
| irFront |
|
|
|
|
- Enumeration values:
-
| With_servo_motor |
|
| Without_servo_motor |
|
|
Generated on Tue Jan 16 02:14:40 2007 for Robotsystem of the Robot Group Leipzig by
 1.3.8
1.3.8