#include <odeagent.h>
Inherits Agent.
Inherited by AtomOdeAgent.
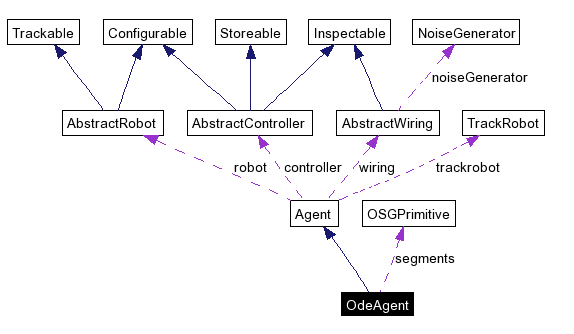
Inheritance diagram for OdeAgent:
Public Member Functions | |
| OdeAgent (const PlotOption &plotOption=PlotOption(NoPlot), double noisefactor=1) | |
| constructor | |
| OdeAgent (const std::list< PlotOption > &plotOptions, double noisefactor=1) | |
| virtual | ~OdeAgent () |
| destructor | |
| virtual bool | init (AbstractController *controller, OdeRobot *robot, AbstractWiring *wiring) |
| initializes the object with the given controller, robot and wiring and initializes pipe to guilogger | |
| virtual void | step (double noise) |
| Performs an step of the agent, including sensor reading, pushing sensor values through wiring, controller step, pushing controller outputs (= motorcommands) back through wiring and sent resulting motorcommands to robot. | |
| void | internInit () |
| virtual OdeRobot * | getRobot () |
| Returns a pointer to the robot. | |
| virtual int | getTraceLength () |
| gives the number of past robot positions shown as trace in osg | |
| virtual void | init_tracing (int tracelength=1000, double tracethickness=0.003) |
| initialize tracing in ode | |
Private Attributes | |
| int | trace_length |
| double | trace_thickness |
| int | counter |
| bool | tracing_initialized |
| OSGPrimitive ** | segments |
| osg::Vec3 | lastpos |
|
||||||||||||
|
constructor
|
|
||||||||||||
|
|
|
|
destructor
|
|
|
Returns a pointer to the robot.
Reimplemented from Agent.
|
|
|
gives the number of past robot positions shown as trace in osg
|
|
||||||||||||||||
|
initializes the object with the given controller, robot and wiring and initializes pipe to guilogger
Reimplemented in AtomOdeAgent.
|
|
||||||||||||
|
initialize tracing in ode
|
|
|
Reimplemented from Agent.
|
|
|
Performs an step of the agent, including sensor reading, pushing sensor values through wiring, controller step, pushing controller outputs (= motorcommands) back through wiring and sent resulting motorcommands to robot.
Reimplemented from Agent.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
 1.3.8
1.3.8