|
Robot Simulator of the Robotics Group for Self-Organization of Control
0.8.0
|
|
Robot Simulator of the Robotics Group for Self-Organization of Control
0.8.0
|
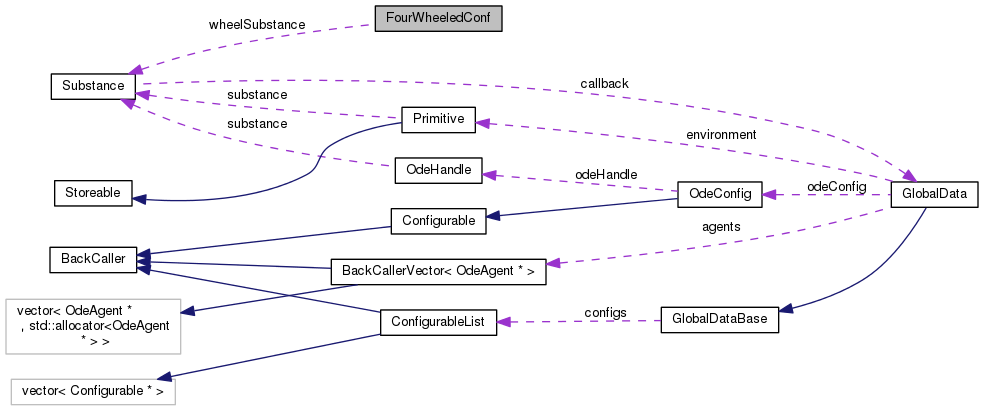
#include <fourwheeled.h>
Public Attributes | |
| double | size |
| double | force |
| double | speed |
| bool | sphereWheels |
| bool | useBumper |
| bool | useButton |
| use yellow Button at the back More... | |
| bool | twoWheelMode |
| if true then the robot emulates 2 wheels More... | |
| bool | irFront |
| bool | irBack |
| bool | irSide |
| double | irRangeFront |
| double | irRangeBack |
| double | irRangeSide |
| Substance | wheelSubstance |
| double force |
| bool irBack |
| bool irFront |
| double irRangeBack |
| double irRangeFront |
| double irRangeSide |
| bool irSide |
| double size |
| double speed |
| bool sphereWheels |
| bool twoWheelMode |
if true then the robot emulates 2 wheels
| bool useBumper |
| bool useButton |
use yellow Button at the back
| Substance wheelSubstance |
 1.8.6
1.8.6 
