|
Robot Simulator of the Robotics Group for Self-Organization of Control
0.8.0
|
|
Robot Simulator of the Robotics Group for Self-Organization of Control
0.8.0
|
#include <multireinforce.h>
Public Attributes | |
| unsigned short | buffersize |
| size of the ringbuffers for sensors, motors,... More... | |
| int | numContext |
| number of context sensors (ignored) More... | |
| std::list< std::string > | satFiles |
| int | numSats |
| filenames for sat networks More... | |
| bool | useDerive |
| input to sat network includes derivatives More... | |
| bool | useY |
| input to sat network includes y (motor values) More... | |
| int | reinforce_interval |
| time between consecutive reinforcement selections More... | |
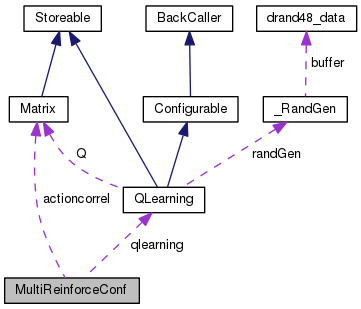
| QLearning * | qlearning |
| QLearning instance. More... | |
| matrix::Matrix * | actioncorrel |
| matrix::Matrix* actioncorrel |
| unsigned short buffersize |
size of the ringbuffers for sensors, motors,...
| int numContext |
number of context sensors (ignored)
| int numSats |
filenames for sat networks
number of satelite networks (derived from length of files
| int reinforce_interval |
time between consecutive reinforcement selections
| std::list<std::string> satFiles |
| bool useDerive |
input to sat network includes derivatives
| bool useY |
input to sat network includes y (motor values)
 1.8.6
1.8.6 
