|
Robot Simulator of the Robotics Group for Self-Organization of Control
0.8.0
|
|
Robot Simulator of the Robotics Group for Self-Organization of Control
0.8.0
|
#include <stdio.h>#include <list>#include <utility>#include <string>#include <vector>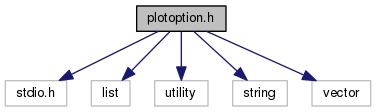
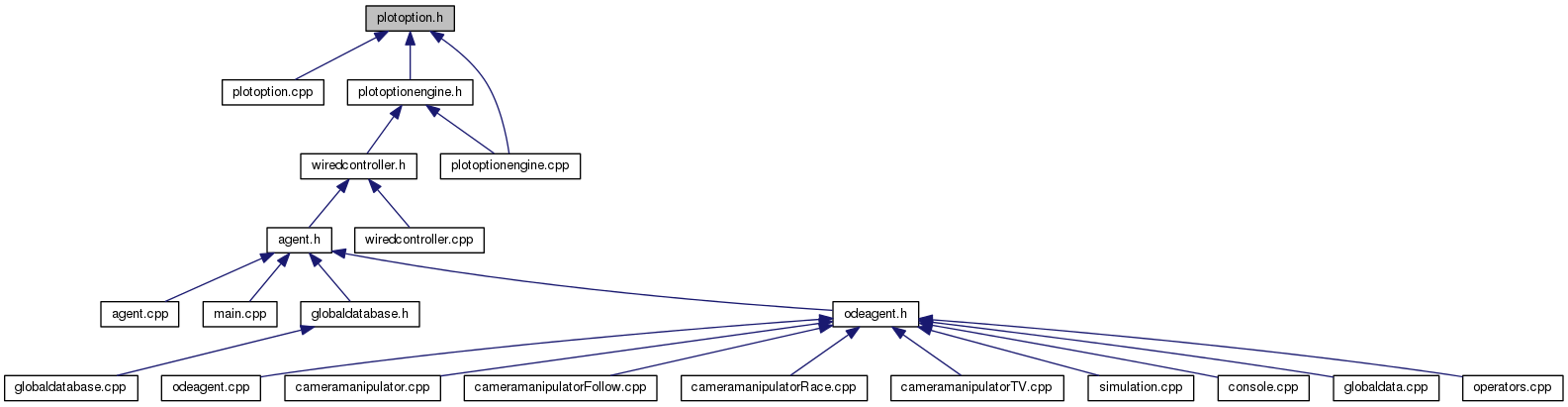
Go to the source code of this file.
Classes | |
| class | PlotOption |
| This class contains options for the use of an external plot utility like guilogger or neuronviz or just simply file output. More... | |
| struct | PlotOption::matchMode |
| nice predicate function for finding by mode More... | |
Enumerations | |
| enum | PlotMode { NoPlot, File, GuiLogger, GuiLogger_File, MatrixViz, SoundMan, ECBRobotGUI, LastPlot } |
| Output mode for agent. More... | |
| enum PlotMode |
Output mode for agent.
 1.8.6
1.8.6 
