|
Robot Simulator of the Robotics Group for Self-Organization of Control
0.8.0
|
|
Robot Simulator of the Robotics Group for Self-Organization of Control
0.8.0
|
#include <iostream>#include <cstdlib>#include <limits>#include <list>#include <utility>#include <string>#include <map>#include "stl_adds.h"#include "backcaller.h"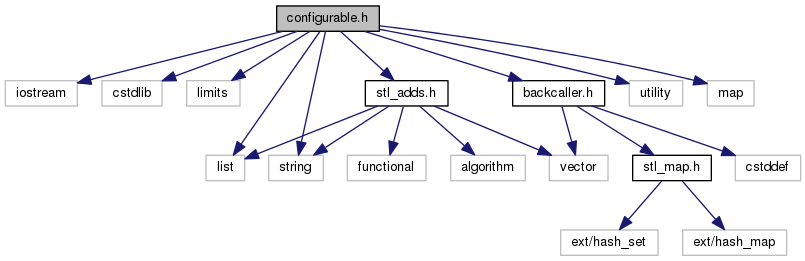

Go to the source code of this file.
Classes | |
| class | Configurable |
| Abstact class for configurable objects. More... | |
| struct | Configurable::matchId |
| nice predicate function for finding by ID More... | |
Macros | |
| #define | valDefMaxBound 10.0 |
| #define | valDefMinBound -10.0 |
| #define | intDefMinBound -10 |
| #define | intDefMaxBound 10 |
| #define intDefMaxBound 10 |
| #define intDefMinBound -10 |
| #define valDefMaxBound 10.0 |
| #define valDefMinBound -10.0 |
 1.8.6
1.8.6 
