|
Robot Simulator of the Robotics Group for Self-Organization of Control
0.8.0
|
|
Robot Simulator of the Robotics Group for Self-Organization of Control
0.8.0
|
The interface for the fitness strategy of an individual. More...
#include <IFitnessStrategy.h>
Public Member Functions | |
| IFitnessStrategy () | |
| default constructor do nothing More... | |
| virtual | ~IFitnessStrategy () |
| default destructor do nothing More... | |
| virtual double | getFitness (const Individual *individual)=0 |
| declaration of the function getFitness. More... | |
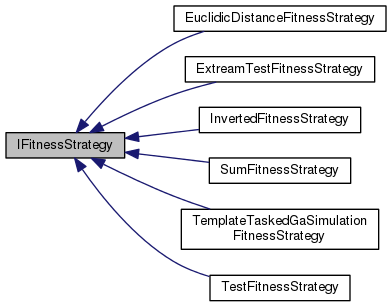
The interface for the fitness strategy of an individual.
| IFitnessStrategy | ( | ) |
default constructor do nothing
|
virtual |
default destructor do nothing
|
pure virtual |
declaration of the function getFitness.
This function will give the fitness value of an individual back. For which individual is him called by 'individual'.
| individual | (const Individual*) calculate the fitness for this individual |
Implemented in ExtreamTestFitnessStrategy, InvertedFitnessStrategy, EuclidicDistanceFitnessStrategy, TemplateTaskedGaSimulationFitnessStrategy, SumFitnessStrategy, and TestFitnessStrategy.
 1.8.6
1.8.6 
