#include <osg/Vec3>
#include <osg/Matrix>
#include "joint.h"
#include "pos.h"
#include "mathutils.h"
#include "odehandle.h"
#include "osgprimitive.h"
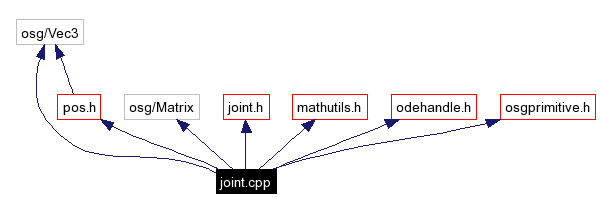
Include dependency graph for joint.cpp:
 1.3.8
1.3.8