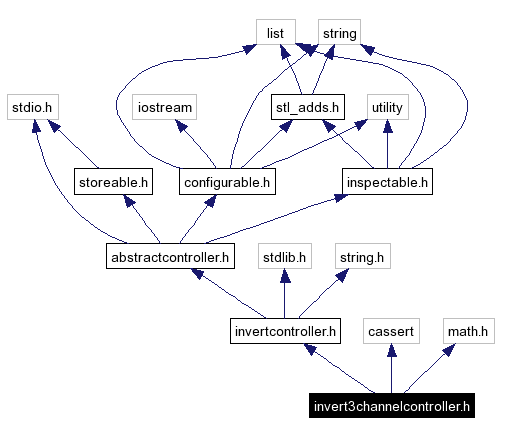
#include "invertcontroller.h"#include <cassert>#include <math.h>Include dependency graph for invert3channelcontroller.h:
Go to the source code of this file.
Classes | |
| class | Invert3ChannelController |
| class for robot controller that use naglaa's direct matrix inversion for n channels (simple one layer networks) More... | |
Functions | |
| AbstractController * | getController (int sensornumber, int motornumber, int param1, double param2) |
|
||||||||||||||||||||
|
|
 1.3.8
1.3.8