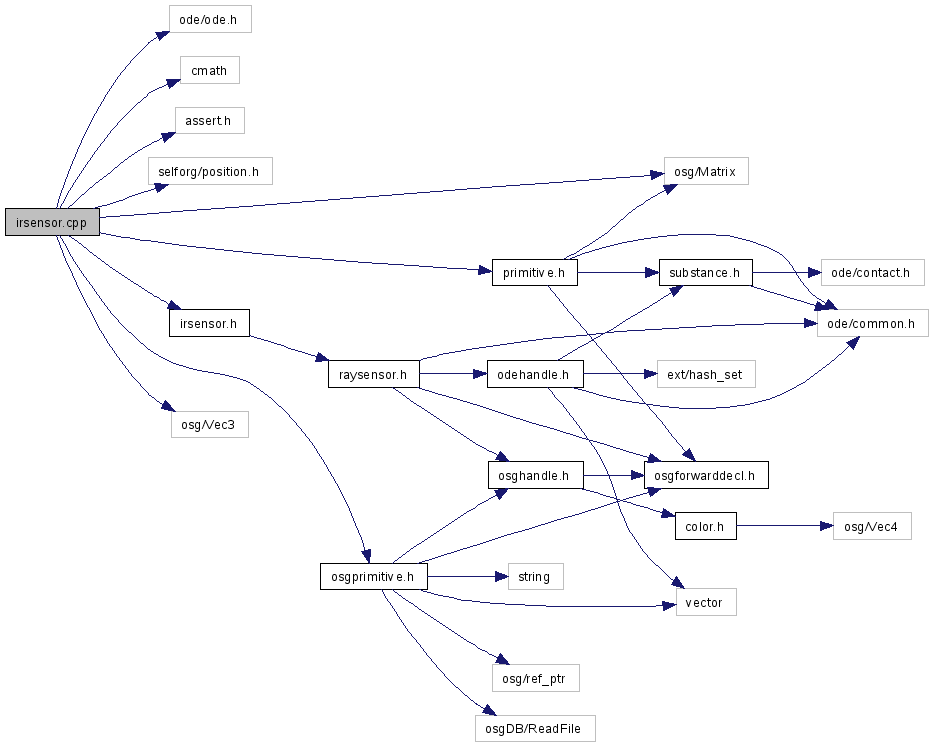
#include <ode/ode.h>#include <cmath>#include <assert.h>#include <selforg/position.h>#include <osg/Matrix>#include <osg/Vec3>#include "primitive.h"#include "osgprimitive.h"#include "irsensor.h"Include dependency graph for irsensor.cpp:
Namespaces | |
| namespace | lpzrobots |
Functions | |
| int | lpzrobots::irCollCallback (dSurfaceParameters ¶ms, GlobalData &globaldata, void *userdata, dContact *contacts, int numContacts, dGeomID o1, dGeomID o2, const Substance &s1, const Substance &s2) |
 1.4.7
1.4.7