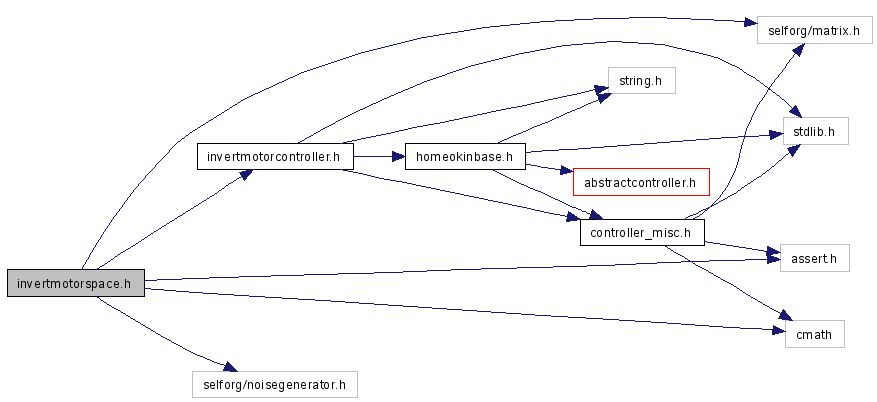
#include "invertmotorcontroller.h"#include <assert.h>#include <cmath>#include <selforg/matrix.h>#include <selforg/noisegenerator.h>Include dependency graph for invertmotorspace.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | InvertMotorSpace |
| class for robot controller that uses the georg's matrixlib for direct matrix inversion for n channels (simple one layer networks) More... | |
 1.4.7
1.4.7