#include <use_java_controller.h>
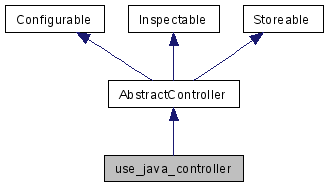
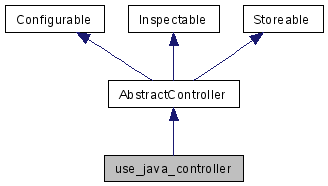
Inherits AbstractController.
Inheritance diagram for use_java_controller:
Public Member Functions | |
| use_java_controller (const char *port_controller="4444", const char *port_internalParams=NULL, const char *name="defaultRobot") | |
| Konstruktor: Initialisiert die Serververbindungen zu Java. | |
| virtual | ~use_java_controller () |
| virtual void | init (int sensornumber, int motornumber, RandGen *randgen=0) |
| initialisation of the controller with the given sensor/ motornumber Must be called before use. | |
| virtual int | getSensorNumber () const |
| virtual int | getMotorNumber () const |
| virtual void | step (const sensor *sensors, int sensornumber, motor *motors, int motornumber) |
| performs one step (includes learning). | |
| virtual void | stepNoLearning (const sensor *, int number_sensors, motor *, int number_motors) |
| performs one step without learning. | |
| void | sendToJava (const char *message, bool abbruch, const char *meldung="Fehler beim Senden der Daten zum Java-Controller\n") |
| Methode verschickt message an Java-controller. | |
| void | closeJavaController () |
| Methode verschickt Protokolle nach Java. | |
| virtual std::list< iparamkey > | getInternalParamNames () const |
| executed once when guilogger or neuronvis or file logger is started to get the names of the inspectable parameters (names should be sent from java-controller and returned) | |
| virtual std::list< iparamval > | getInternalParams () const |
| executed every step when guilogger or neuronvis or file logger is active to get the values of the inspectable parameters (values should be sent from java-controller and returned) | |
| virtual paramval | getParam (const paramkey &key) const |
| executed when a parameter is asked from the console (value should be sent from java-controller and returned) | |
| virtual bool | setParam (const paramkey &key, paramval val) |
| executed when a parameter is set on the console (new value should be sent to java-controller) | |
| virtual paramlist | getParamList () const |
| executed once from simulation for asking the parameter names (parameter names should be sent from java-controller and returned) | |
| virtual bool | store (FILE *f) const |
| stores the object to the given file stream (binary). | |
| virtual bool | restore (FILE *f) |
| loads the object from the given file stream (binary). | |
Static Public Member Functions | |
| static void | addController () |
Static Public Attributes | |
| static int | anzahl_Java_controller = 0 |
Protected Attributes | |
| int | t |
| const char * | name |
| int | number_sensors |
| int | number_motors |
| int | number_controlled |
| bool | serverOK |
| int | server_controller |
| int | server_internalParams |
| int | client_controller |
| int | client_internalParams |
| socklen_t | client_controller_size |
| socklen_t | client_internalParams_size |
| sockaddr_in | server_controller_addr |
| sockaddr_in | server_internalParams_addr |
| sockaddr_in | client_controller_addr |
| sockaddr_in | client_internalParams_addr |
| paramlist | config_param_list |
| int | anz_config_param |
| iparamkeylist | internal_keylist |
| iparamvallist | internal_vallist |
| iparamvallist | internal_vallist_alt |
| int | anz_internal_param |
| bool | can_send |
| bool | isFirst |
| bool | isClosed |
| bool | server_guilogger_isClosed |
| bool | server_controller_isClosed |
| int | anzahl_closed_Server |
| double * | motor_values_alt |
| use_java_controller | ( | const char * | port_controller = "4444", |
|
| const char * | port_internalParams = NULL, |
|||
| const char * | name = "defaultRobot" | |||
| ) |
Konstruktor: Initialisiert die Serververbindungen zu Java.
| port_controller | Portnummer für die Kommunikation des Controllers | |
| port_internalParams | Portnummer für die Kommunikation des Guiloggers |
| ~use_java_controller | ( | ) | [virtual] |
| static void addController | ( | ) | [inline, static] |
| void closeJavaController | ( | ) |
Methode verschickt Protokolle nach Java.
| list< Inspectable::iparamkey > getInternalParamNames | ( | ) | const [virtual] |
executed once when guilogger or neuronvis or file logger is started to get the names of the inspectable parameters (names should be sent from java-controller and returned)
Reimplemented from Inspectable.
| list< Inspectable::iparamval > getInternalParams | ( | ) | const [virtual] |
executed every step when guilogger or neuronvis or file logger is active to get the values of the inspectable parameters (values should be sent from java-controller and returned)
Reimplemented from Inspectable.
| virtual int getMotorNumber | ( | ) | const [inline, virtual] |
Implements AbstractController.
| Configurable::paramval getParam | ( | const paramkey & | key | ) | const [virtual] |
executed when a parameter is asked from the console (value should be sent from java-controller and returned)
| Configurable::paramlist getParamList | ( | ) | const [virtual] |
executed once from simulation for asking the parameter names (parameter names should be sent from java-controller and returned)
Reimplemented from Configurable.
| virtual int getSensorNumber | ( | ) | const [inline, virtual] |
Implements AbstractController.
| void init | ( | int | sensornumber, | |
| int | motornumber, | |||
| RandGen * | randgen = 0 | |||
| ) | [virtual] |
initialisation of the controller with the given sensor/ motornumber Must be called before use.
Implements AbstractController.
| virtual bool restore | ( | FILE * | f | ) | [inline, virtual] |
| void sendToJava | ( | const char * | message, | |
| bool | abbruch, | |||
| const char * | meldung = "Fehler beim Senden der Daten zum Java-Controller\n" | |||
| ) |
Methode verschickt message an Java-controller.
executed when a parameter is set on the console (new value should be sent to java-controller)
performs one step (includes learning).
Calculates motor commands from sensor inputs.
| sensors | sensors inputs scaled to [-1,1] | |
| sensornumber | length of the sensor array | |
| motors | motors outputs. MUST have enough space for motor values! | |
| motornumber | length of the provided motor array |
Implements AbstractController.
| virtual bool store | ( | FILE * | f | ) | const [inline, virtual] |
int anz_config_param [protected] |
int anz_internal_param [protected] |
int anzahl_closed_Server [protected] |
int anzahl_Java_controller = 0 [static] |
bool can_send [protected] |
int client_controller [protected] |
struct sockaddr_in client_controller_addr [protected] |
socklen_t client_controller_size [protected] |
int client_internalParams [protected] |
struct sockaddr_in client_internalParams_addr [protected] |
socklen_t client_internalParams_size [protected] |
paramlist config_param_list [protected] |
iparamkeylist internal_keylist [protected] |
iparamvallist internal_vallist [protected] |
iparamvallist internal_vallist_alt [protected] |
bool isClosed [protected] |
bool isFirst [protected] |
double* motor_values_alt [protected] |
const char* name [protected] |
Reimplemented from Configurable.
int number_controlled [protected] |
int number_motors [protected] |
int number_sensors [protected] |
int server_controller [protected] |
struct sockaddr_in server_controller_addr [protected] |
bool server_controller_isClosed [protected] |
bool server_guilogger_isClosed [protected] |
int server_internalParams [protected] |
struct sockaddr_in server_internalParams_addr [protected] |
bool serverOK [protected] |
int t [protected] |
 1.4.7
1.4.7