#include <wiringsequence.h>
Inherits AbstractWiring.
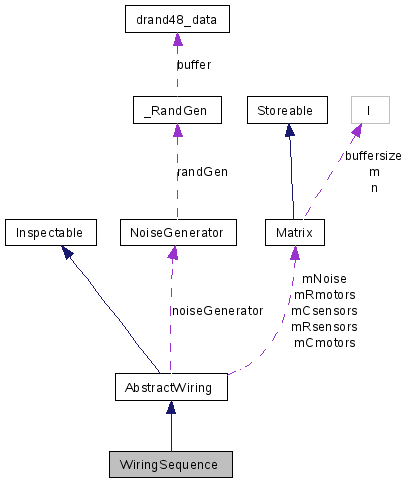
Inheritance diagram for WiringSequence:
Public Member Functions | |
| WiringSequence (std::list< AbstractWiring * >) | |
| constructor: The wirings given in the list are applied in the sequence. | |
| WiringSequence (AbstractWiring *w1, AbstractWiring *w2) | |
| constructor provided for convinience, essentially calls addWiring(w1);addWiring(w2) | |
| virtual | ~WiringSequence () |
| virtual void | addWiring (AbstractWiring *wiring) |
| adds a wiring to the list of wirings | |
| virtual iparamkeylist | getInternalParamNames () const |
| pass through of first wiring | |
| virtual iparamvallist | getInternalParams () const |
| pass through of first wiring | |
Protected Member Functions | |
| virtual bool | initIntern (int robotsensornumber, int robotmotornumber, RandGen *randGen=0) |
| to be overloaded by subclasses | |
| virtual bool | wireSensorsIntern (const sensor *rsensors, int rsensornumber, sensor *csensors, int csensornumber, double noise) |
| to be overloaded by subclasses | |
| virtual bool | wireMotorsIntern (motor *rmotors, int rmotornumber, const motor *cmotors, int cmotornumber) |
| to be overloaded by subclasses | |
Protected Attributes | |
| std::vector< AbstractWiring * > | wirings |
| bool | initialised |
| WiringSequence | ( | std::list< AbstractWiring * > | ) |
constructor: The wirings given in the list are applied in the sequence.
For the sensors in normal order and for the motors in reverse order
| WiringSequence | ( | AbstractWiring * | w1, | |
| AbstractWiring * | w2 | |||
| ) |
constructor provided for convinience, essentially calls addWiring(w1);addWiring(w2)
| ~WiringSequence | ( | ) | [virtual] |
| void addWiring | ( | AbstractWiring * | wiring | ) | [virtual] |
adds a wiring to the list of wirings
| Inspectable::iparamkeylist getInternalParamNames | ( | ) | const [virtual] |
| Inspectable::iparamvallist getInternalParams | ( | ) | const [virtual] |
| bool initIntern | ( | int | robotsensornumber, | |
| int | robotmotornumber, | |||
| RandGen * | randGen = 0 | |||
| ) | [protected, virtual] |
bool initialised [protected] |
Reimplemented from AbstractWiring.
std::vector<AbstractWiring*> wirings [protected] |
 1.4.7
1.4.7