#include <qlearning.h>
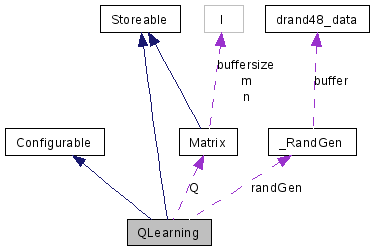
Inherits Configurable, and Storeable.
Inheritance diagram for QLearning:
Public Member Functions | |
| QLearning (double eps, double discount, double exploration, int eligibility, bool random_initQ=false, bool useSARSA=false, int tau=1000) | |
| virtual | ~QLearning () |
| virtual void | init (unsigned int stateDim, unsigned int actionDim, RandGen *randGen=0) |
| initialisation with the given number of action and states | |
| virtual unsigned int | select (unsigned int state) |
| selection of action given current state. | |
| virtual unsigned int | select_sample (unsigned int state) |
| selection of action given current state. | |
| virtual unsigned int | select_keepold (unsigned int state) |
| select with preference to old (90% if good) and 30% second best | |
| virtual double | learn (unsigned int state, unsigned int action, double reward, double learnRateFactor=1) |
| matrix::Matrix | getActionValues (unsigned int state) |
| returns the vector of values for all actions given the current state | |
| virtual void | reset () |
| tells the q learning that the agent was reset, so that it forgets it memory. | |
| virtual unsigned int | getStateDim () const |
| returns the number of states | |
| virtual unsigned int | getActionDim () const |
| returns the number of actions | |
| virtual double | getCollectedReward () const |
| returns the collectedReward reward | |
| virtual const matrix::Matrix & | getQ () const |
| returns q table (mxn) == (states x actions) | |
| virtual bool | store (FILE *f) const |
| stores the object to the given file stream (binary). | |
| virtual bool | restore (FILE *f) |
| loads the object from the given file stream (binary). | |
Static Public Member Functions | |
| static int | valInCrossProd (const std::list< std::pair< int, int > > &vals) |
| expects a list of value,range and returns the associated state | |
| static std::list< int > | ConfInCrossProd (const std::list< int > &ranges, int val) |
| expects a list of ranges and a state/action and return the configuration | |
Public Attributes | |
| bool | useSARSA |
| if true, use SARSA strategy otherwise qlearning | |
Protected Attributes | |
| double | eps |
| double | discount |
| double | exploration |
| double | eligibility |
| bool | random_initQ |
| int | tau |
| time horizont for averaging the reward | |
| matrix::Matrix | Q |
| int * | actions |
| < Q table (mxn) == (states x actions) | |
| int * | states |
| double * | rewards |
| int | ringbuffersize |
| double * | longrewards |
| int | t |
| bool | initialised |
| double | collectedReward |
| RandGen * | randGen |
| QLearning | ( | double | eps, | |
| double | discount, | |||
| double | exploration, | |||
| int | eligibility, | |||
| bool | random_initQ = false, |
|||
| bool | useSARSA = false, |
|||
| int | tau = 1000 | |||
| ) |
| eps | learning rate (typically 0.1) | |
| discount | discount factor for Q-values (typically 0.9) | |
| exploration | exploration rate (typically 0.02) | |
| eligibility | number of steps to update backwards in time | |
| random_initQ | if true Q table is filled with small random numbers at the start (default: false) | |
| useSARSA | if true, use SARSA strategy otherwise qlearning (default: false) | |
| tau | number of time steps to average over reward for col_rew |
| ~QLearning | ( | ) | [virtual] |
| std::list< int > ConfInCrossProd | ( | const std::list< int > & | ranges, | |
| int | val | |||
| ) | [static] |
expects a list of ranges and a state/action and return the configuration
| unsigned int getActionDim | ( | ) | const [virtual] |
returns the number of actions
| matrix::Matrix getActionValues | ( | unsigned int | state | ) |
returns the vector of values for all actions given the current state
| double getCollectedReward | ( | ) | const [virtual] |
returns the collectedReward reward
| virtual const matrix::Matrix& getQ | ( | ) | const [inline, virtual] |
returns q table (mxn) == (states x actions)
| unsigned int getStateDim | ( | ) | const [virtual] |
returns the number of states
| void init | ( | unsigned int | stateDim, | |
| unsigned int | actionDim, | |||
| RandGen * | randGen = 0 | |||
| ) | [virtual] |
initialisation with the given number of action and states
| actionDim | number of actions | |
| stateDim | number of states | |
| unit_map | if 0 the parametes are choosen randomly. Otherwise the model is initialised to represent a unit_map with the given response strength. |
| double learn | ( | unsigned int | state, | |
| unsigned int | action, | |||
| double | reward, | |||
| double | learnRateFactor = 1 | |||
| ) | [virtual] |
| void reset | ( | ) | [virtual] |
tells the q learning that the agent was reset, so that it forgets it memory.
please note, that updating the Q-table is one step later, so in case of a reward you should call learn one more time before reset.
| bool restore | ( | FILE * | f | ) | [virtual] |
| unsigned int select | ( | unsigned int | state | ) | [virtual] |
selection of action given current state.
The policy is to take the actions with the highest value, or a random action at the rate of exploration
| unsigned int select_keepold | ( | unsigned int | state | ) | [virtual] |
select with preference to old (90% if good) and 30% second best
| unsigned int select_sample | ( | unsigned int | state | ) | [virtual] |
selection of action given current state.
The policy is to sample from the above average actions, with bias to the old action (also exploration included).
| bool store | ( | FILE * | f | ) | const [virtual] |
| int valInCrossProd | ( | const std::list< std::pair< int, int > > & | vals | ) | [static] |
expects a list of value,range and returns the associated state
int* actions [protected] |
< Q table (mxn) == (states x actions)
double collectedReward [protected] |
double discount [protected] |
double eligibility [protected] |
double eps [protected] |
double exploration [protected] |
bool initialised [protected] |
double* longrewards [protected] |
matrix::Matrix Q [protected] |
bool random_initQ [protected] |
double* rewards [protected] |
int ringbuffersize [protected] |
int* states [protected] |
int t [protected] |
int tau [protected] |
time horizont for averaging the reward
| bool useSARSA |
if true, use SARSA strategy otherwise qlearning
 1.4.7
1.4.7