#include <abstractcontrolleradapter.h>
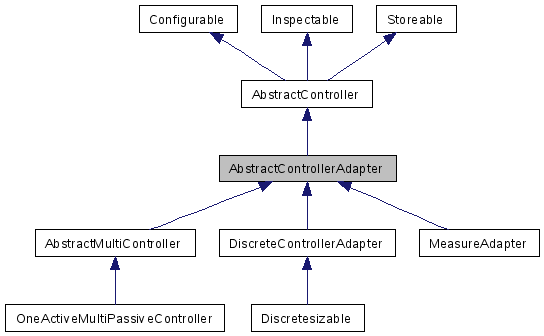
Inherits AbstractController.
Inherited by AbstractMultiController, DiscreteControllerAdapter, and MeasureAdapter.
Inheritance diagram for AbstractControllerAdapter:
Public Member Functions | |
| AbstractControllerAdapter (AbstractController *controller) | |
| AbstractControllerAdapter (AbstractController *controller, const std::string &name, const std::string &revision) | |
| contructor (hint: use $ID$ for revision) | |
| virtual | ~AbstractControllerAdapter () |
| virtual void | init (int sensornumber, int motornumber, RandGen *randGen=0) |
| initialisation of the controller with the given sensor/ motornumber Must NORMALLY be called before use. | |
| virtual int | getSensorNumber () const |
| virtual int | getMotorNumber () const |
| virtual void | step (const sensor *sensors, int sensornumber, motor *motors, int motornumber) |
| performs one step (includes learning). | |
| virtual void | stepNoLearning (const sensor *sensors, int sensornumber, motor *motors, int motornumber) |
| performs one step without learning. | |
| virtual paramval | getParam (const paramkey &key) const |
| virtual bool | setParam (const paramkey &key, paramval val) |
| virtual paramlist | getParamList () const |
| The list of all parameters with there value as allocated lists. | |
| virtual iparamkeylist | getInternalParamNames () const |
| The list of the names of all internal parameters given by getInternalParams(). | |
| virtual iparamvallist | getInternalParams () const |
| virtual bool | store (FILE *f) const |
| virtual bool | restore (FILE *f) |
Protected Attributes | |
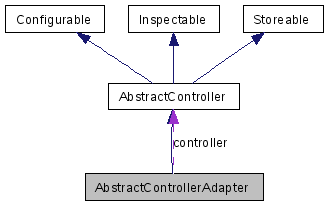
| AbstractController * | controller |
The controller gets a number of input sensor values each timestep and has to generate a number of output motor values.
Interface assumes the following usage:
This is an abstract adapter class, it's useful for implementing adapters such as the DescreteController, which can be used with all Controllers.
Note that the configureable and inspectable classes hold internal lists that are copied here. If a new parameter is added to either interfaces after the call of the contructor then this will not be visible througt the adapter (at least partially. get and set will work but not the printing (also used by store))
| AbstractControllerAdapter | ( | AbstractController * | controller | ) | [inline] |
| AbstractControllerAdapter | ( | AbstractController * | controller, | |
| const std::string & | name, | |||
| const std::string & | revision | |||
| ) | [inline] |
contructor (hint: use $ID$ for revision)
| virtual ~AbstractControllerAdapter | ( | ) | [inline, virtual] |
| virtual iparamkeylist getInternalParamNames | ( | ) | const [inline, virtual] |
The list of the names of all internal parameters given by getInternalParams().
The naming convention is "v[i]" for vectors and "A[i][j]" for matrices, where i, j start at 0.
Reimplemented from Inspectable.
Reimplemented in AbstractMultiController, DiscreteControllerAdapter, MeasureAdapter, and OneActiveMultiPassiveController.
| virtual iparamvallist getInternalParams | ( | ) | const [inline, virtual] |
Reimplemented from Inspectable.
Reimplemented in AbstractMultiController, DiscreteControllerAdapter, MeasureAdapter, and OneActiveMultiPassiveController.
| virtual int getMotorNumber | ( | ) | const [inline, virtual] |
Implements AbstractController.
| virtual paramlist getParamList | ( | ) | const [inline, virtual] |
The list of all parameters with there value as allocated lists.
Note that these are only parameters that are managed manually (with setParam, getParam)
Reimplemented from Configurable.
| virtual int getSensorNumber | ( | ) | const [inline, virtual] |
Implements AbstractController.
| virtual void init | ( | int | sensornumber, | |
| int | motornumber, | |||
| RandGen * | randGen = 0 | |||
| ) | [inline, virtual] |
initialisation of the controller with the given sensor/ motornumber Must NORMALLY be called before use.
For all ControllerAdapters call first AbstractControllerAdapter::init(sensornumber,motornumber) if you overwrite this method
Implements AbstractController.
Reimplemented in AbstractMultiController, DiscreteControllerAdapter, MeasureAdapter, and OneActiveMultiPassiveController.
| virtual bool restore | ( | FILE * | f | ) | [inline, virtual] |
Implements Storeable.
Reimplemented in AbstractMultiController, MeasureAdapter, and OneActiveMultiPassiveController.
| virtual void step | ( | const sensor * | sensors, | |
| int | sensornumber, | |||
| motor * | motors, | |||
| int | motornumber | |||
| ) | [inline, virtual] |
performs one step (includes learning).
Calculates motor commands from sensor inputs.
| sensors | sensors inputs scaled to [-1,1] | |
| sensornumber | length of the sensor array | |
| motors | motors outputs. MUST have enough space for motor values! | |
| motornumber | length of the provided motor array |
Implements AbstractController.
Reimplemented in AbstractMultiController, DiscreteControllerAdapter, Discretesizable, MeasureAdapter, and OneActiveMultiPassiveController.
| virtual void stepNoLearning | ( | const sensor * | sensors, | |
| int | sensornumber, | |||
| motor * | motors, | |||
| int | motornumber | |||
| ) | [inline, virtual] |
performs one step without learning.
Implements AbstractController.
Reimplemented in AbstractMultiController, DiscreteControllerAdapter, Discretesizable, MeasureAdapter, and OneActiveMultiPassiveController.
| virtual bool store | ( | FILE * | f | ) | const [inline, virtual] |
Implements Storeable.
Reimplemented in AbstractMultiController, MeasureAdapter, and OneActiveMultiPassiveController.
AbstractController* controller [protected] |
 1.4.7
1.4.7