#include <invertcontroller.h>
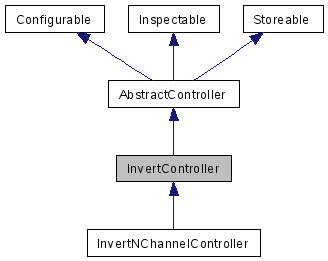
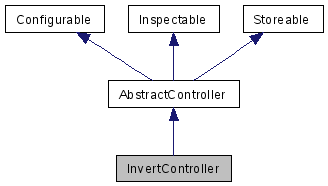
Inherits AbstractController.
Inherited by InvertNChannelController.
Inheritance diagram for InvertController:
Public Member Functions | |
| InvertController (const std::string &name, const std::string &revision) | |
| virtual paramval | getParam (const paramkey &key) const |
| virtual bool | setParam (const paramkey &key, paramval val) |
| virtual paramlist | getParamList () const |
| The list of all parameters with there value as allocated lists. | |
Protected Attributes | |
| paramval | eps |
| paramval | rho |
| paramval | desens |
| paramval | s4delay |
| paramval | s4avg |
| paramval | factor_a |
| paramval | number_it |
| paramval | epsilon_it |
| paramval | delta |
| paramval | damping_c |
Implements standart parameters: eps, rho, mu, stepnumber4avg, stepnumber4delay
| InvertController | ( | const std::string & | name, | |
| const std::string & | revision | |||
| ) | [inline] |
| virtual paramlist getParamList | ( | ) | const [inline, virtual] |
The list of all parameters with there value as allocated lists.
Reimplemented from Configurable.
paramval epsilon_it [protected] |
 1.4.7
1.4.7