#include <deprivation.h>
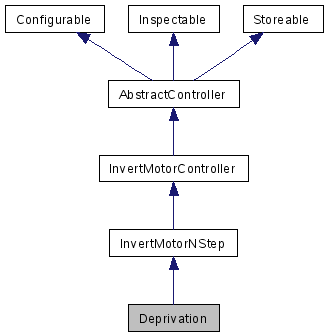
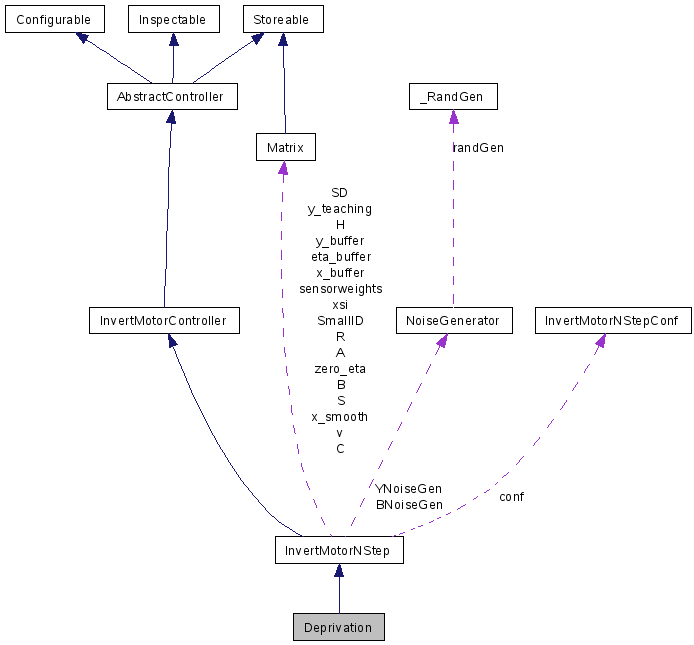
Inherits InvertMotorNStep.
Inheritance diagram for Deprivation:
Public Types | |
| typedef matrix::Matrix(*) | MotorCallback (const matrix::Matrix &y) |
| is called with current motor values and returns new motor values | |
| typedef void(*) | ControllerCallback (matrix::Matrix &C, matrix::Matrix &H) |
| is called with current controller matrix C and bias H which can be alterned | |
Public Member Functions | |
| Deprivation (MotorCallback motorCallback, ControllerCallback controllerCallback=0, const InvertMotorNStepConf &conf=getDefaultConf()) | |
| virtual | ~Deprivation () |
| virtual void | setExternalControlMode (bool useExternal) |
| virtual bool | getExternalControlMode () |
Protected Member Functions | |
| virtual void | learnController () |
| overloaded | |
| virtual matrix::Matrix | calculateControllerValues (const Matrix &x_smooth) |
| calculate controller outputs (only of nop external value is set) | |
Protected Attributes | |
| bool | useExternal |
| MotorCallback | motorCallback |
| ControllerCallback | controllerCallback |
| typedef void(*) ControllerCallback(matrix::Matrix &C, matrix::Matrix &H) |
is called with current controller matrix C and bias H which can be alterned
| typedef matrix::Matrix(*) MotorCallback(const matrix::Matrix &y) |
is called with current motor values and returns new motor values
| Deprivation | ( | MotorCallback | motorCallback, | |
| ControllerCallback | controllerCallback = 0, |
|||
| const InvertMotorNStepConf & | conf = getDefaultConf() | |||
| ) | [inline] |
| virtual ~Deprivation | ( | ) | [inline, virtual] |
| virtual matrix::Matrix calculateControllerValues | ( | const Matrix & | x_smooth | ) | [inline, protected, virtual] |
calculate controller outputs (only of nop external value is set)
| x_smooth | smoothed sensors Matrix(number_channels,1) |
| virtual bool getExternalControlMode | ( | ) | [inline, virtual] |
| virtual void learnController | ( | ) | [inline, protected, virtual] |
| virtual void setExternalControlMode | ( | bool | useExternal | ) | [inline, virtual] |
ControllerCallback controllerCallback [protected] |
MotorCallback motorCallback [protected] |
bool useExternal [protected] |
 1.4.7
1.4.7