|
Robot Simulator of the Robotics Group for Self-Organization of Control
0.8.0
|
|
Robot Simulator of the Robotics Group for Self-Organization of Control
0.8.0
|
#include <universalcontroller.h>
Public Attributes | |
| unsigned int | buffersize |
| buffersize size of the time-buffer for x,y,v More... | |
| double | init |
| init size of the matrices of the network. More... | |
| double | squashsize |
| update squashing More... | |
| bool | someInternalParams |
| someInternalParams if true only some internal parameters are exported, all otherwise More... | |
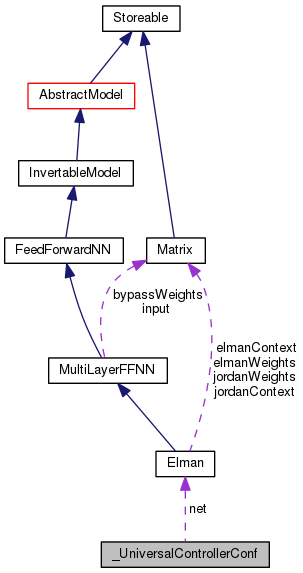
| Elman * | net |
| entire contoller network (should have at least 2 layers) More... | |
| int | motorlayer |
| index of motor layer in the network (if -1 then one but last layer) More... | |
| unsigned int buffersize |
buffersize size of the time-buffer for x,y,v
| double init |
init size of the matrices of the network.
| int motorlayer |
index of motor layer in the network (if -1 then one but last layer)
| Elman* net |
entire contoller network (should have at least 2 layers)
| bool someInternalParams |
someInternalParams if true only some internal parameters are exported, all otherwise
| double squashsize |
update squashing
 1.8.6
1.8.6 
