matrixutils.cpp File Reference
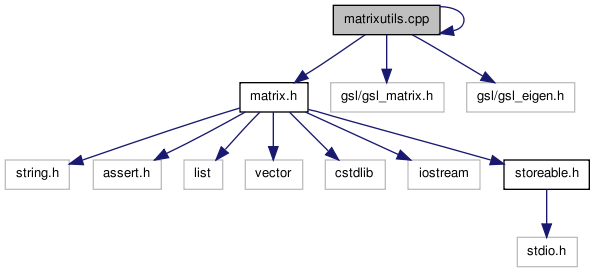
#include "matrixutils.h"#include "matrix.h"#include <gsl/gsl_matrix.h>#include <gsl/gsl_eigen.h>
Include dependency graph for matrixutils.cpp:
This graph shows which files directly or indirectly include this file:

Namespaces | |
| namespace | matrix |
namespace for the matrix library | |
Functions | |
| gsl_matrix * | toGSL (const Matrix &src) |
| copies our matrix into a gsl matrix (don't forget gsl_matrix_free) | |
| Matrix | fromGSL (const gsl_matrix *src) |
| copies gsl matrix to our matrix | |
| Matrix | fromGSL (const gsl_vector *src) |
| copies gsl vector to our matrix (column-vector) | |
| Matrix | fromGSL_real (const gsl_matrix_complex *src) |
| copies the real part of gsl matrix_complex to our matrix | |
| Matrix | fromGSL_imag (const gsl_matrix_complex *src) |
| copies the imag part of gsl matrix_complex to our matrix | |
| Matrix | eigenValuesRealSym (const Matrix &m) |
| calculates the eigenvalues of the real and symmetric matrix m and returns them as a column vector in descending order | |
| bool | eigenValuesVectorsRealSym (const Matrix &m, Matrix &eigenvalues, Matrix &eigenvectors) |
| calculates the eigenvalues and corresponding eigenvectors of the the real and symmetric matrix m. | |
| bool | eigenValues (const Matrix &m, Matrix &vals_real, Matrix &vals_imag) |
| calculates the eigenvalues of the matrix m and returns them as a column vectors seperated to real and imaginary part in descending order. | |
| bool | eigenValuesVectors (const Matrix &m, Matrix &vals_real, Matrix &vals_imag, Matrix &vecs_real, Matrix &vecs_imag) |
| calculates the eigenvalues and corresponding eigenvectors of the matrix m. | |
