gripper.h File Reference
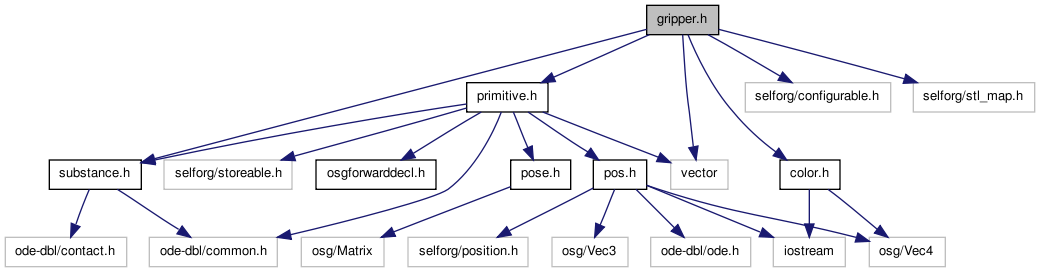
#include "substance.h"#include "primitive.h"#include "color.h"#include <selforg/configurable.h>#include <selforg/stl_map.h>#include <vector>
Include dependency graph for gripper.h:
Go to the source code of this file.
Classes | |
| struct | GripperConf |
| Configure object for Gripper. More... | |
| class | Gripper |
| A gripper can be attached to a primitive via its substance and implements gripping (a fixed joint) on collision with specified objects. More... | |
Namespaces | |
| namespace | lpzrobots |
forward declarations | |
Typedefs | |
| typedef std::vector< Gripper * > | GripperList |
