OneControllerPerChannel Class Reference
class for using multiple controller, one for each joint. More...
#include <onecontrollerperchannel.h>
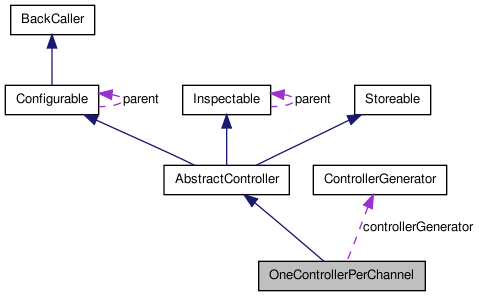
Inherits AbstractController.
Public Member Functions | |
| OneControllerPerChannel (ControllerGenerator *controllerGenerator, std::string controllerName, int numCtrlCreateBeforeInit=1, int numContextSensors=0) | |
| virtual | ~OneControllerPerChannel () |
| virtual void | init (int sensornumber, int motornumber, RandGen *randGen=0) |
| initialisation of the controller with the given sensor/ motornumber Must be called before use. | |
| virtual void | step (const sensor *sensors, int sensornumber, motor *motors, int motornumber) |
| performs one step (includes learning). | |
| virtual void | stepNoLearning (const sensor *sensors, int sensornumber, motor *motors, int motornumber) |
| performs one step without learning. | |
| virtual int | getSensorNumber () const |
| virtual int | getMotorNumber () const |
| virtual bool | store (FILE *f) const |
| stores the object to the given file stream (binary). | |
| virtual bool | restore (FILE *f) |
| loads the object from the given file stream (binary). | |
| virtual std::vector < AbstractController * > | getControllers () const |
Protected Attributes | |
| std::vector< AbstractController * > | ctrl |
| ControllerGenerator * | controllerGenerator |
| int | numCtrlCreateBeforeInit |
| int | numContextSensors |
| int | motornumber |
| int | sensornumber |
| double * | sensorbuffer |
Detailed Description
class for using multiple controller, one for each joint.
Each controller has dimension 1x1. The controller are generated on the fly with a generator object
Constructor & Destructor Documentation
| OneControllerPerChannel | ( | ControllerGenerator * | controllerGenerator, | |
| std::string | controllerName, | |||
| int | numCtrlCreateBeforeInit = 1, |
|||
| int | numContextSensors = 0 | |||
| ) |
- Parameters:
-
controllerGenerator generator object for controller controllerName name numCtrlCreateBeforeInit number of controller that are generated before the init function is called. Useful if they should be put into the inspectable list of the agent numContextSensors number of context sensors (counted from the end) passed to all controllers
| ~OneControllerPerChannel | ( | ) | [virtual] |
Member Function Documentation
| virtual std::vector<AbstractController*> getControllers | ( | ) | const [inline, virtual] |
| virtual int getMotorNumber | ( | ) | const [inline, virtual] |
- Returns:
- Number of motors the controller was initialised with or 0 if not initialised
Implements AbstractController.
| virtual int getSensorNumber | ( | ) | const [inline, virtual] |
- Returns:
- Number of sensors the controller was initialised with or 0 if not initialised
Implements AbstractController.
| void init | ( | int | sensornumber, | |
| int | motornumber, | |||
| RandGen * | randGen = 0 | |||
| ) | [virtual] |
initialisation of the controller with the given sensor/ motornumber Must be called before use.
The random generator is optional.
Implements AbstractController.
| bool restore | ( | FILE * | f | ) | [virtual] |
loads the object from the given file stream (binary).
Implements Storeable.
performs one step (includes learning).
Calculates motor commands from sensor inputs.
- Parameters:
-
sensors sensors inputs scaled to [-1,1] sensornumber length of the sensor array motors motors outputs. MUST have enough space for motor values! motornumber length of the provided motor array
Implements AbstractController.
| bool store | ( | FILE * | f | ) | const [virtual] |
stores the object to the given file stream (binary).
Implements Storeable.
Member Data Documentation
ControllerGenerator* controllerGenerator [protected] |
std::vector<AbstractController*> ctrl [protected] |
int motornumber [protected] |
int numContextSensors [protected] |
int numCtrlCreateBeforeInit [protected] |
double* sensorbuffer [protected] |
int sensornumber [protected] |
The documentation for this class was generated from the following files:
