DerivativeWiring Class Reference
Implements a wiring (between controller and robot) which includes the first and second derivative of the original robot sensor values. More...
#include <derivativewiring.h>
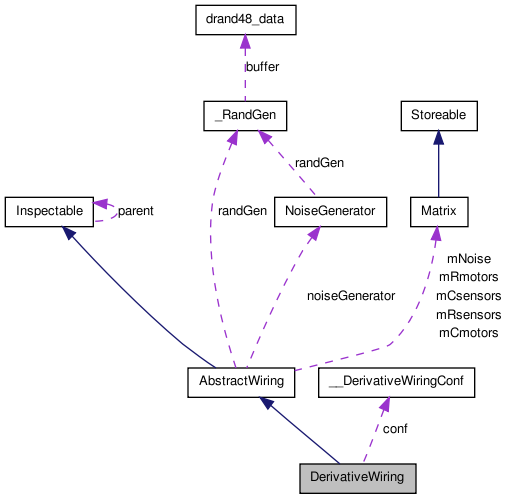
Inherits AbstractWiring.
Public Member Functions | |
| DerivativeWiring (const DerivativeWiringConf &conf, NoiseGenerator *noise, const std::string &name="DerivativeWiring") | |
| constructor | |
| virtual | ~DerivativeWiring () |
| destructor | |
| virtual void | reset () |
| reset internal state | |
Static Public Member Functions | |
| static DerivativeWiringConf | getDefaultConf () |
| Providing default configuration for DerivativeWiring with first derivative. | |
| static DerivativeWiringConf | getDefaultConf1 () |
| Providing default configuration for DerivativeWiring for only first derivative. | |
Protected Member Functions | |
| virtual bool | initIntern () |
| to be overloaded by subclasses The rsensornumber and rmotornumber are already stored in the member variables. | |
| virtual bool | wireSensorsIntern (const sensor *rsensors, int rsensornumber, sensor *csensors, int csensornumber, double noise) |
| Realizes a wiring from robot sensors to controller sensors. | |
| virtual bool | wireMotorsIntern (motor *rmotors, int rmotornumber, const motor *cmotors, int cmotornumber) |
| Realizes wiring from controller motor outputs to robot motors. | |
| void | calcFirstDerivative () |
| Calculate the first derivative of the sensorvalues given by the robot f'(x) = (f(x+1) - f(x-1)) / 2 since we do not have f(x+1) we go one timestep in the past. | |
| void | calcSecondDerivative () |
| Calculate the secound derivative of the sensorvalues given by the robot f'(x) = f(x) - 2f(x-1) + f(x-2). | |
Protected Attributes | |
| DerivativeWiringConf | conf |
| used configuration | |
| int | time |
| sensor * | sensorbuffer [buffersize] |
| number timesteps the sensor values are delayed for calculation of the derivative | |
| sensor * | first |
| current sensors (with noise) | |
| sensor * | second |
| current second derivative | |
| motor * | blindMotors |
| array that stored the values of the blind motors | |
Static Protected Attributes | |
| static const int | buffersize = 40 |
Detailed Description
Implements a wiring (between controller and robot) which includes the first and second derivative of the original robot sensor values.
Constructor & Destructor Documentation
| DerivativeWiring | ( | const DerivativeWiringConf & | conf, | |
| NoiseGenerator * | noise, | |||
| const std::string & | name = "DerivativeWiring" | |||
| ) |
constructor
- Parameters:
-
conf for giving the wished configuration of DerivativeWiring via DerivativeWiringConf noise NoiseGenerator that is used for adding noise to sensor values
| ~DerivativeWiring | ( | ) | [virtual] |
destructor
Member Function Documentation
| void calcFirstDerivative | ( | ) | [protected] |
Calculate the first derivative of the sensorvalues given by the robot f'(x) = (f(x+1) - f(x-1)) / 2 since we do not have f(x+1) we go one timestep in the past.
f'(x) = (f(x+1) - f(x-1)) / 2
| void calcSecondDerivative | ( | ) | [protected] |
Calculate the secound derivative of the sensorvalues given by the robot f'(x) = f(x) - 2f(x-1) + f(x-2).
f'(x) = f(x) - 2f(x-1) + f(x-2)
| static DerivativeWiringConf getDefaultConf | ( | ) | [inline, static] |
Providing default configuration for DerivativeWiring with first derivative.
No smoothing and no scaling. ( as static method )
| static DerivativeWiringConf getDefaultConf1 | ( | ) | [inline, static] |
Providing default configuration for DerivativeWiring for only first derivative.
smoothing over 4 steps and scale of 5. Use smaller noise! ( as static method )
| bool initIntern | ( | ) | [protected, virtual] |
to be overloaded by subclasses The rsensornumber and rmotornumber are already stored in the member variables.
The random values are to be accessed via the noiseGenerator.
- See also:
- init()
Implements AbstractWiring.
| void reset | ( | ) | [virtual] |
reset internal state
Reimplemented from AbstractWiring.
| bool wireMotorsIntern | ( | motor * | rmotors, | |
| int | rmotornumber, | |||
| const motor * | cmotors, | |||
| int | cmotornumber | |||
| ) | [protected, virtual] |
Realizes wiring from controller motor outputs to robot motors.
Implements AbstractWiring.
| bool wireSensorsIntern | ( | const sensor * | rsensors, | |
| int | rsensornumber, | |||
| sensor * | csensors, | |||
| int | csensornumber, | |||
| double | noise | |||
| ) | [protected, virtual] |
Realizes a wiring from robot sensors to controller sensors.
Implements AbstractWiring.
Member Data Documentation
motor* blindMotors [protected] |
array that stored the values of the blind motors
const int buffersize = 40 [static, protected] |
DerivativeWiringConf conf [protected] |
used configuration
sensor* sensorbuffer[buffersize] [protected] |
number timesteps the sensor values are delayed for calculation of the derivative
current and old smoothed sensor values of robot
int time [protected] |
The documentation for this class was generated from the following files:
