CopyWiring Class Reference
Implements a wiring where the motors are copied to several motors and the sensors are fusioned. More...
#include <copywiring.h>
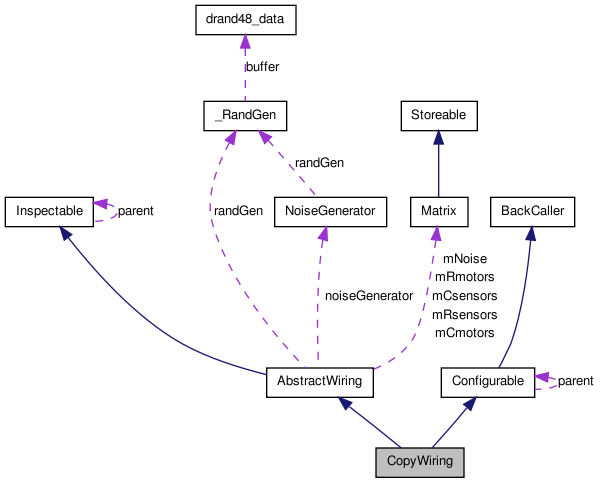
Inherits AbstractWiring, and Configurable.
Public Types | |
| typedef std::vector< std::list < int > > | Assignment |
Public Member Functions | |
| CopyWiring (const Assignment &sensor_assignment, const Assignment &motor_assignment, NoiseGenerator *noise, int plotMode=Controller|Robot, const std::string &name="CopyWiring") | |
| constructor | |
| virtual | ~CopyWiring () |
| destructor | |
| virtual void | reset () |
| reset internal state | |
Static Public Member Functions | |
| static Assignment | motorFromSensorAssignment (const Assignment &sensor_assignment) |
| returns the inverse Assignment of the given sensor assignemnt (typically the right thing) | |
Protected Member Functions | |
| virtual bool | initIntern () |
| initializes the number of sensors and motors on robot side, calculate number of sensors and motors on controller side | |
| virtual bool | wireSensorsIntern (const sensor *rsensors, int rsensornumber, sensor *csensors, int csensornumber, double noise) |
| Realizes one to one wiring from robot sensors to controller sensors. | |
| virtual bool | wireMotorsIntern (motor *rmotors, int rmotornumber, const motor *cmotors, int cmotornumber) |
| Realizes one to one wiring from controller motor outputs to robot motors. | |
Protected Attributes | |
| Assignment | s_assign |
| Assignment | m_assign |
Detailed Description
Implements a wiring where the motors are copied to several motors and the sensors are fusioned.
Member Typedef Documentation
| typedef std::vector< std::list<int> > Assignment |
Constructor & Destructor Documentation
| CopyWiring | ( | const Assignment & | sensor_assignment, | |
| const Assignment & | motor_assignment, | |||
| NoiseGenerator * | noise, | |||
| int | plotMode = Controller|Robot, |
|||
| const std::string & | name = "CopyWiring" | |||
| ) |
constructor
- Parameters:
-
sensor_assignment for each controller sensor a list of robot sensor it is averaged over motor_assignment for each robot motor a list of controller motors it is averaged over noise NoiseGenerator that is used for adding noise to sensor values plotMode see AbstractWiring
| ~CopyWiring | ( | ) | [virtual] |
destructor
Member Function Documentation
| bool initIntern | ( | ) | [protected, virtual] |
initializes the number of sensors and motors on robot side, calculate number of sensors and motors on controller side
Implements AbstractWiring.
| CopyWiring::Assignment motorFromSensorAssignment | ( | const Assignment & | sensor_assignment | ) | [static] |
returns the inverse Assignment of the given sensor assignemnt (typically the right thing)
| void reset | ( | ) | [virtual] |
reset internal state
Reimplemented from AbstractWiring.
| bool wireMotorsIntern | ( | motor * | rmotors, | |
| int | rmotornumber, | |||
| const motor * | cmotors, | |||
| int | cmotornumber | |||
| ) | [protected, virtual] |
Realizes one to one wiring from controller motor outputs to robot motors.
- Parameters:
-
rmotors pointer to array of motorvalues for robot rmotornumber number of robot motors cmotors pointer to array of motorvalues from controller cmotornumber number of motorvalues from controller
Implements AbstractWiring.
| bool wireSensorsIntern | ( | const sensor * | rsensors, | |
| int | rsensornumber, | |||
| sensor * | csensors, | |||
| int | csensornumber, | |||
| double | noise | |||
| ) | [protected, virtual] |
Realizes one to one wiring from robot sensors to controller sensors.
- Parameters:
-
rsensors pointer to array of sensorvalues from robot rsensornumber number of sensors from robot csensors pointer to array of sensorvalues for controller csensornumber number of sensors to controller noise size of the noise added to the sensors
Implements AbstractWiring.
Member Data Documentation
Assignment m_assign [protected] |
Assignment s_assign [protected] |
The documentation for this class was generated from the following files:
