#include <selectiveone2onewiring.h>
Inherits One2OneWiring.
Inheritance diagram for SelectiveOne2OneWiring:
Public Member Functions | |
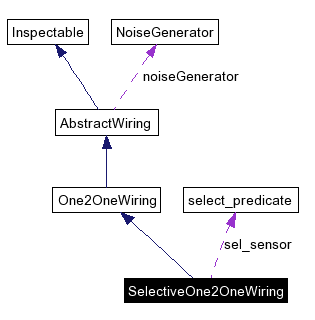
| SelectiveOne2OneWiring (NoiseGenerator *noise, select_predicate *sel_sensor) | |
| constructor | |
| virtual | ~SelectiveOne2OneWiring () |
| virtual bool | init (int robotsensornumber, int robotmotornumber) |
| initializes the number of sensors and motors on robot side, calculate number of sensors and motors on controller side | |
| virtual bool | wireSensors (const sensor *rsensors, int rsensornumber, sensor *csensors, int csensornumber, double noise) |
| Realizes one to one wiring from robot sensors to controller sensors. | |
Protected Attributes | |
| select_predicate * | sel_sensor |
|
||||||||||||
|
constructor
|
|
|
|
|
||||||||||||
|
initializes the number of sensors and motors on robot side, calculate number of sensors and motors on controller side
Reimplemented from One2OneWiring.
|
|
||||||||||||||||||||||||
|
Realizes one to one wiring from robot sensors to controller sensors.
Reimplemented from One2OneWiring.
|
|
|
|
 1.3.8
1.3.8