primitive.cpp File Reference
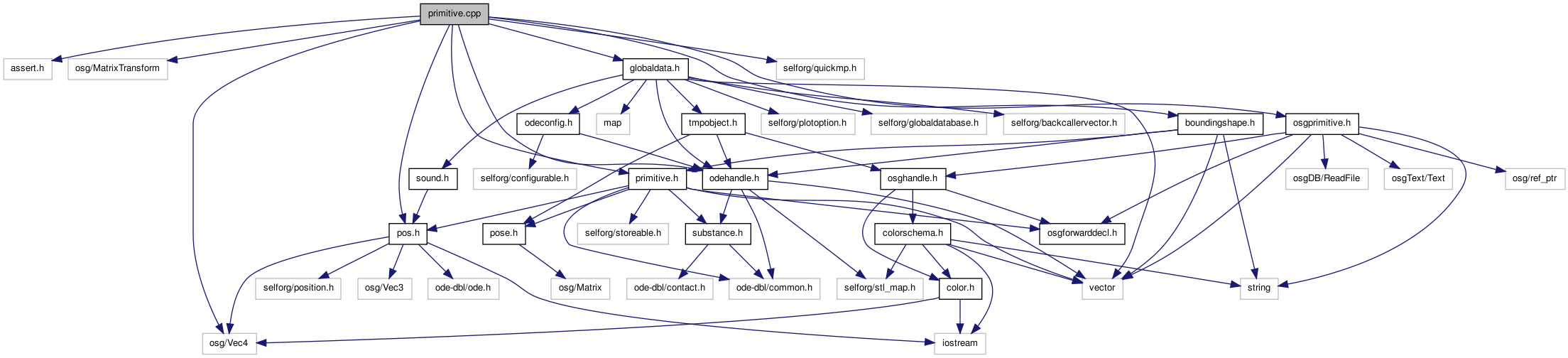
#include <assert.h>#include <osg/MatrixTransform>#include <osg/Vec4>#include "primitive.h"#include "pos.h"#include "boundingshape.h"#include "osgprimitive.h"#include "odehandle.h"#include "globaldata.h"#include <selforg/quickmp.h>
Include dependency graph for primitive.cpp:
Namespaces | |
| namespace | lpzrobots |
forward declarations | |
Functions | |
| Pose | osgPose (dGeomID geom) |
| returns the osg (4x4) pose matrix of the ode geom | |
| Pose | osgPose (dBodyID body) |
| returns the osg (4x4) pose matrix of the ode body | |
| Pose | osgPose (const double *position, const double *rotation) |
| converts a position vector and a rotation matrix from ode to osg 4x4 matrix | |
| void | odeRotation (const Pose &pose, dMatrix3 &odematrix) |
| converts the rotation component of pose into an ode rotation matrix | |
Variables | |
| int | globalNumVelocityViolations = 0 |
| counts number of max velocity violations at joints (Attention, this is a global variable, initialized to 0 at start) | |
