arm2segm.h File Reference
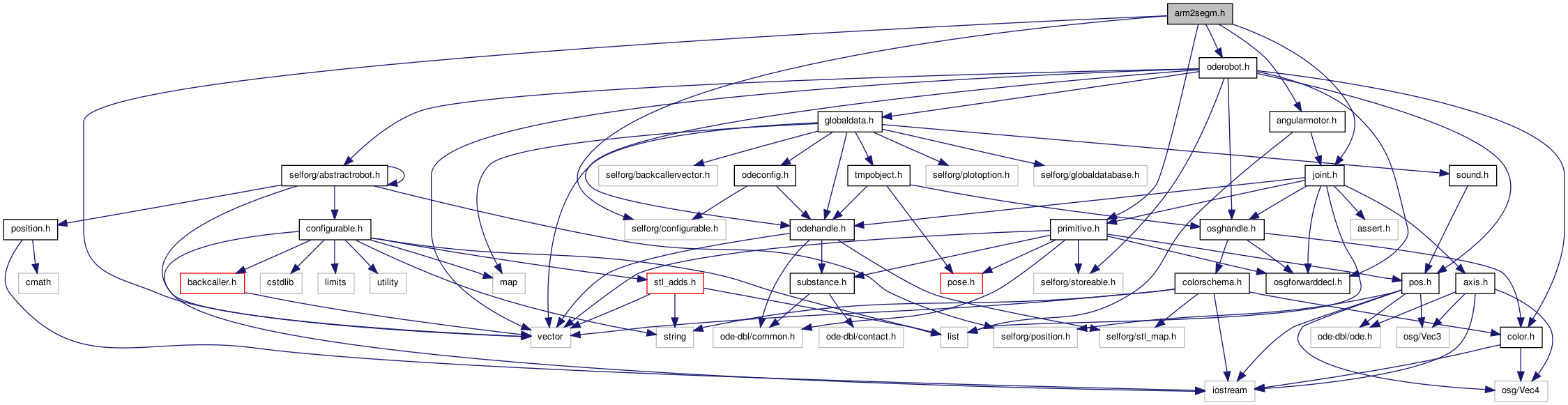
#include "oderobot.h"#include <selforg/configurable.h>#include <vector>#include "primitive.h"#include "joint.h"#include "angularmotor.h"
Include dependency graph for arm2segm.h:
Go to the source code of this file.
Classes | |
| struct | Arm2SegmConf |
| class | Arm2Segm |
Namespaces | |
| namespace | lpzrobots |
forward declarations | |
