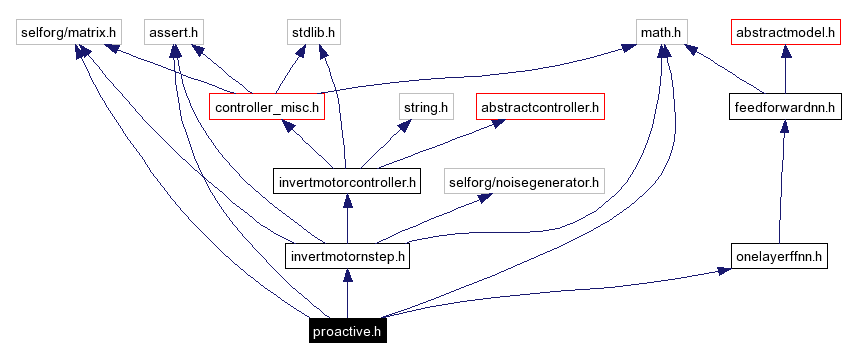
#include "invertmotornstep.h"#include "onelayerffnn.h"#include <assert.h>#include <math.h>#include <selforg/matrix.h>Include dependency graph for proactive.h:
Go to the source code of this file.
Classes | |
| class | ProActive |
| robot controller for self-organized behaviour using pro-active elements and it is based in InvertMotorNStep. More... | |
 1.3.8
1.3.8