Kcontrol trials
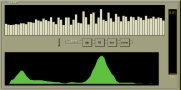
kcontrol camera display
This is a screenshot from the camera view of kcontrol. The robot looks at
a wall with 1/8 inch wide, vertical black and white stripes at different
distances. The top row shows the intensity of the 64 pixel values. The
bottom row shows the filtered image obtained by fast fourier transform.

| 15mm
|
| 
| 260mm
|

| 65mm
|
| 
| 340mm
|

| 155mm
|
| 
| 425mm
|
homeokinetic learning
The robot learns wall following, moving thru corridors, balancing a ball
and moving in a maze.
More about homeokinesis
long time run
The khepera robot was controlled by an homeokinetic controller
on a long term run for 3 days within this environment. The corners where rounded to avoid
stalling. The robot was trained for wall following by placing it under a
convient angle to the wall and removing from the wall by hand when it crashes.
It learned quickly to follow the wall. Then the robot was left alone. Most of
the time it was following the outer wall on its left side.
|
| 
|
| After about 5.5 million timesteps the robot was trapped in the top left corner.
The robot decided to shift the inner wall against the outer wall. Then it moved into
the corner and started spinning around at high speed.
|
|
|
|
|
|
|
| The evolution of the parameters ci of the controller.
|
More about homeokinesis
back to kcontrol




maintained by
Thomas Pantzer ,
mailto
pantec@aix520.informatik.uni-leipzig.de,
PGP public key available